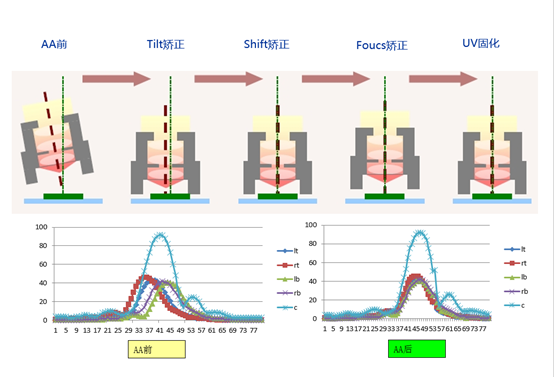
AA(Active Alignment)制程的主要流程如下:
主要步骤分为AA前调节、倾斜角度调节、中心度调节、清晰度调节和UV固化等步骤。AA前后的MTF曲线分别如上图所示。
核心技术分析
1.1中心度调节算法
光心:即光学中心,由于镜头成像面照度轴外像点的光照度E1与轴上成像光照度E0有如下关系:
E1=E0*cos 4 ω (ω: lens FOV)
故其sensor 表面接受的光照度,由lens中心向边缘衰减,如上图所示。
读取画面RGB,根据RGB与YUV的矩阵变化关系,得到像素点的亮度分量:
Y=0.299*R+0.587*G+0.114*B
得出画面的整体亮度分布情况。根据拟合圆,得到画面的光学中心,再与画面的几何中心比较,即可得到光学中心的偏心量。
1.2 SFR清晰度算法
SFR是通过分析相机拍摄到的图像中一个黑色到白色的斜边而得到的,即下图中所示的红框部分。其中,区域1的垂直斜边用于计算水平SFR,而区域2的水平斜边用于计算垂直SFR。一般我们只考虑水平SFR,而垂直SFR可以由水平SFR通过旋转90°之后获得。
1.3 平整度调节算法
1.4 运动控制
微调平台参数列表如下图所示:
以原来的IMX178芯片为例,分辨率为1536*1024,芯片尺寸为8.92mm,
7421.81536≈4.8um
则单个像素对应的实际距离为4.8um,则X平移对应的比例换算为
脉冲数=N*4.82000*1000*10 = 24N(N为像素点之差)
备注:10为驱动器的细分数目,刻盘上为MS1 5,查表对应的细分数为10。
同理,IMX226,分辨率为4096*2160,芯片尺寸为9.33mm,
8252.6724096≈2.014um
单个像素对应的实际尺寸为2.0um,则X平移对应的比例换算为
通过移动Z轴,可获取图像MTF区域的数条过焦点清晰度曲线,如上图所示,根据各个曲线达到最高点的步长之差,可以计算出真实情况下各个MTF区域Z轴上的真实距离之差。Sensor的真实尺寸已知,根据图像分辨率和MTF区域在图像上的相对位置,则MTF区域的三维空间坐标亦可以换算得到。由此通过最小二乘法可以计算得到整个Sensor平面与镜头的相对倾斜角度,即得到θx和θy,如下图所示。